高速・高精度な電子機器製造の分野において、電子針テストアダプタはPCB、チップ、モジュールの品質を保証する門番として機能しています。部品のピン間隔がますます狭くなり、テストの複雑さが増すにつれて、テストにおける精度と信頼性の要求はかつてないほど高まっています。この精密測定革命において、マイクロステッピングモータは「精密な筋肉」として不可欠な役割を果たしています。この記事では、この小さな動力コアが電子針テストアダプタの中でどのように精密に動作し、現代の電子機器テストを新たな時代へと導くのかを詳しく解説します。
一。はじめに: ミクロンレベルの検査精度が求められる場合

従来のテスト方法は、今日のマイクロピッチBGA、QFP、CSPパッケージのテストニーズに対応できなくなっています。電子ニードルテストアダプタの中心的な役割は、数十、あるいは数千ものテストプローブを駆動し、被試験ユニットのテストポイントと信頼性の高い物理的および電気的接続を確立することです。わずかな位置ずれ、不均一な圧力、あるいは不安定な接触は、テストの失敗、誤判定、さらには製品の損傷につながる可能性があります。独自のデジタル制御と高精度特性を備えたマイクロステッピングモーターは、これらの課題に対処する理想的なソリューションとなっています。
一。アダプタ内のマイクロステッピングモータのコア動作機構

電子針テストアダプターのマイクロステッピングモーターの動作は、単純な回転ではなく、精密かつ制御された一連の協調動作です。そのワークフローは、以下の主要なステップに分解できます。
1. 正確な位置合わせと初期位置決め
ワークフロー:
受信手順:ホスト コンピュータ (テスト ホスト) は、テスト対象のコンポーネントの座標データをモーション コントロール カードに送信し、モーション コントロール カードはそれを一連のパルス信号に変換します。
パルス変換動作:これらのパルス信号はマイクロステッピングモーターのドライバに送られます。各パルス信号はモーターシャフトを駆動し、一定の角度(「ステップ角」)だけ回転させます。高度なマイクロステッピング駆動技術により、1つのステップ角を256個以上のマイクロステップに分割することができ、マイクロメートルレベル、さらにはサブマイクロメートルレベルの変位制御が可能になります。
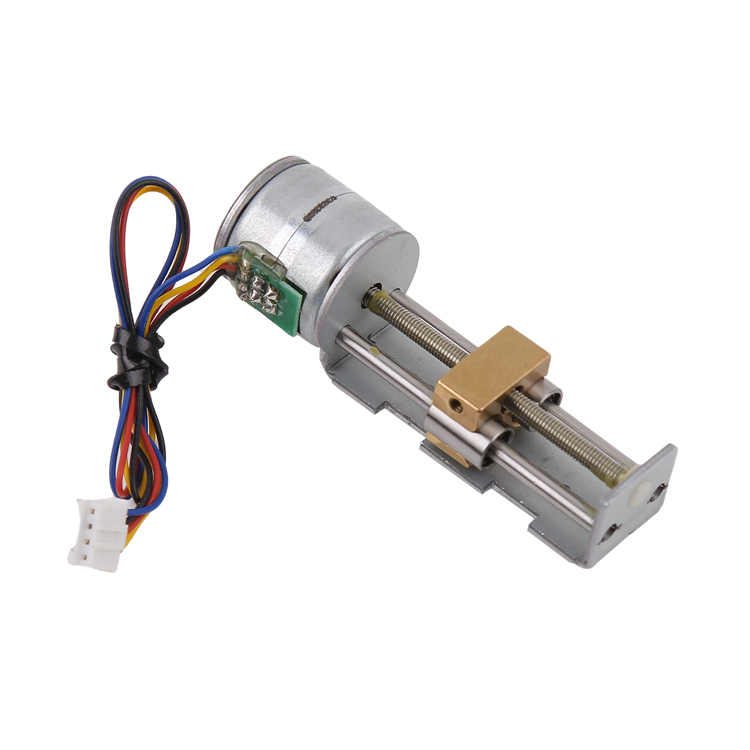
実行位置:モーターは、精密リードスクリューやタイミングベルトなどの伝達機構を介して、テストプローブを搭載したキャリッジを駆動し、X軸およびY軸平面上を移動させます。システムは、特定の数のパルスを送信することで、プローブアレイをテスト対象点の真上に正確に移動させます。
2. 制御された圧縮と圧力管理
ワークフロー:
Z軸近似:平面位置決めが完了すると、Z軸移動を担うマイクロステッピングモーターが動作を開始します。マイクロステッピングモーターは指示を受け取り、テストヘッド全体または単一のプローブモジュールをZ軸に沿って垂直下方に移動させます。
正確な移動制御:モーターはマイクロステップでスムーズに押し下げ、プレスの移動距離を正確に制御します。これは非常に重要です。移動距離が短すぎると接触不良につながり、長すぎるとプローブスプリングが過度に圧縮され、過剰な圧力が加わってはんだパッドが損傷する可能性があります。
圧力を維持するためのトルクの維持:プローブがテストポイントに設定された接触深度に達すると、マイクロステッピングモーターの回転が停止します。この時点で、モーターは高い保持トルクによってしっかりと固定され、継続的な電源供給を必要とせずに一定かつ信頼性の高いダウンフォースを維持します。これにより、テストサイクル全体を通して電気接続の安定性が確保されます。特に高周波信号テストでは、安定した機械的接触が信号整合性の基盤となります。
3. マルチポイントスキャンと複雑なパスのテスト
ワークフロー:
複数の異なる領域または異なる高さでコンポーネントのテストが必要な複雑な PCB の場合、アダプタは複数のマイクロ ステッピング モーターを統合して多軸モーション システムを形成します。
このシステムは、事前にプログラムされたテストシーケンスに従って、各種モーターの動きを調整します。例えば、最初にエリアAをテストし、次にXYモーターが協調してプローブアレイをエリアBに移動し、Z軸モーターが再び押し下げられてテストを開始します。この「飛行テスト」モードにより、テスト効率が大幅に向上します。
プロセス全体を通して、モーターの正確な位置記憶機能により、各動作の位置決め精度の再現性が保証され、累積的なエラーが排除されます。
一。マイクロステッピングモータを選ぶ理由 – 動作メカニズムの背後にある利点
前述の精密な動作メカニズムは、マイクロステッピングモーター自体の技術的特性から生じています。
デジタル化とパルス同期:モーターの位置は入力パルス数と厳密に同期しており、コンピュータやPLCとのシームレスな統合による完全なデジタル制御を可能にします。自動テストに最適です。
累積エラーなし:過負荷状態では、ステッピングモーターのステップ誤差は徐々に蓄積されません。各動作の精度はモーターとドライバの固有の性能のみに依存するため、長期試験における信頼性を確保します。
コンパクトな構造と高いトルク密度:小型設計により、コンパクトなテスト装置内に簡単に組み込むことができ、プローブアレイを駆動するのに十分なトルクを提供しながら、パフォーマンスとサイズの完璧なバランスを実現します。
一。課題への対応:作業効率を最適化する技術
マイクロステッピングモーターは、その優れた利点にもかかわらず、実用化においては共振、振動、潜在的なステップロスといった課題にも直面しています。電子針テストアダプターにおけるスムーズな動作を保証するため、業界では以下の最適化技術が採用されています。
マイクロステップ駆動技術の詳細な応用:マイクロステップにより、解像度が向上するだけでなく、より重要なのは、モーターの動きが滑らかになり、低速クリープ時の振動とノイズが大幅に減少し、プローブの接触がより柔軟になることです。
閉ループ制御システムの導入:極めて要求の高いアプリケーションでは、マイクロステッピングモーターにエンコーダを追加して閉ループ制御システムを構築します。このシステムはモーターの実際の位置をリアルタイムで監視し、過剰な抵抗などによる脱調を検出すると、直ちに修正します。これにより、オープンループ制御の信頼性と閉ループシステムの安全性保証が両立します。
一。結論
要約すると、電子針テストアダプタにおけるマイクロステッピングモータの動作は、デジタル命令を物理世界の精密な動作に変換する完璧な例です。パルスの受信、マイクロステップ動作、位置維持といった一連の精密制御可能な動作を実行することで、精密な位置合わせ、制御可能な押圧、複雑なスキャンといった重要なタスクを担います。これは、テストの自動化を実現するための重要な実行コンポーネントであるだけでなく、テストの精度、信頼性、効率性を向上させるための中核エンジンでもあります。電子部品の小型化と高密度化が進むにつれ、マイクロステッピングモータの技術、特にマイクロステップと閉ループ制御技術は、電子テスト技術を新たな高みへと押し上げ続けるでしょう。
投稿日時: 2025年11月26日