ウォームギア伝動装置はウォームとウォームホイールで構成され、一般的にウォームが作動部となります。ウォームギアには同じ右ねじと左ねじがあり、それぞれ右ウォームギア、左ウォームギアと呼ばれます。ウォームは、1つまたは複数の螺旋歯を持つ歯車で、ウォームホイールと噛み合って、交互に配置された軸歯車対を形成します。インデックス面は円筒形、円錐形、または円形で、アルキメデスウォーム、インボリュートウォーム、通常直線形状ウォーム、テーパー付き円筒ウォームの4種類があります。
ウォームギア伝動の利点。
✦ 単段変速比は大きく、一般的にはi=10~100です。動力伝達のインデックス機構では、最大1500を超えることもあります。
✦ 同一噛み合いは線接触なので、大きな力にも耐えられます。
✦ コンパクトな構造、スムーズな伝達、低騒音。
✦ ウォームのリフト角がギア間の等価摩擦角よりも小さい場合、カウンターストロークによるセルフロックが発生します。つまり、ウォームのみがウォームホイールを駆動でき、ウォームホイールは駆動できません。
ウォームギアドライブの欠点。
✦2つの軸が垂直であるため、2つのホイールノードの線速度が垂直になり、相対的な滑り速度が大きく、加熱や摩耗が発生しやすくなります。
✦効率は低く、通常は 0.7 ~ 0.8 です。セルフロック式ウォームギアを備えたウォームギアはさらに効率が低く、通常は 0.5 未満です。
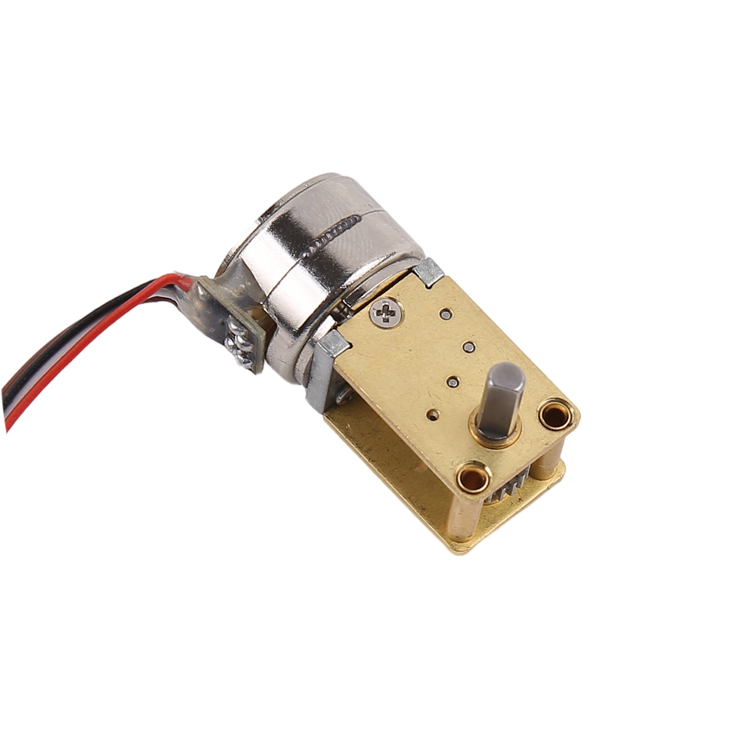
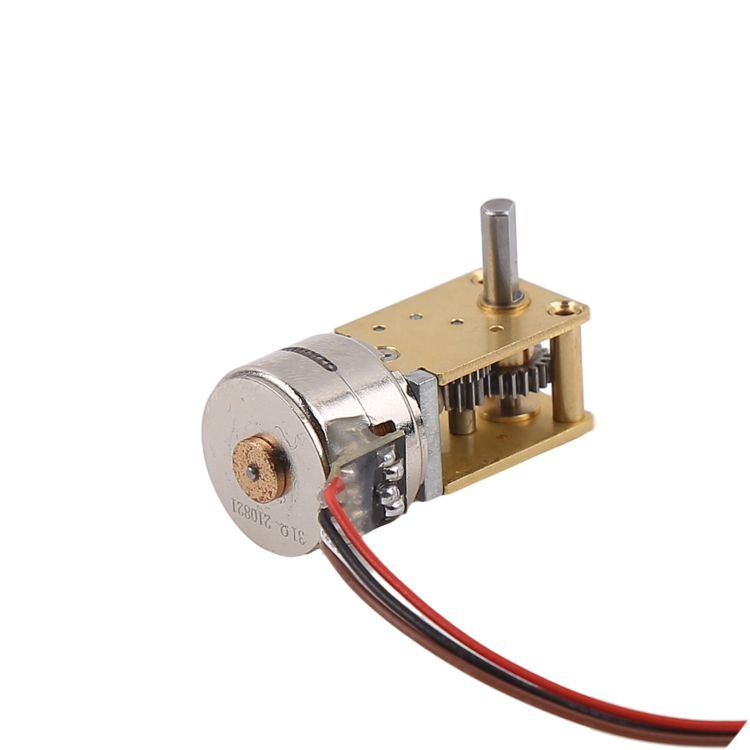
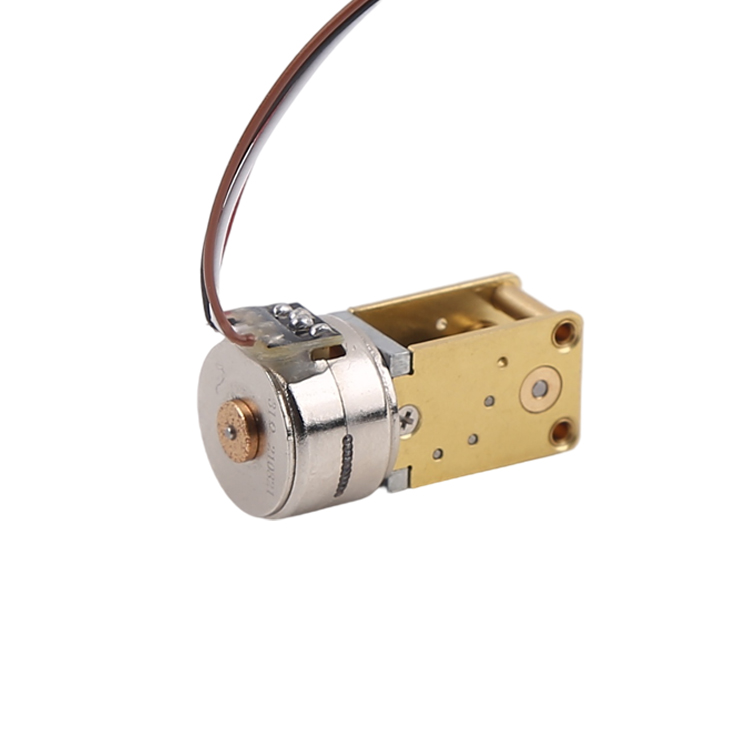
はウォームギアステッピングモーター必ずセルフロック性能を備えているのでしょうか?
いいえ、前提条件があります。リード角<摩擦角の場合、ウォームギアステッピングモーター自動ロックが可能です。
通常、ギア減速ステッピングモーターを選択する場合、ユーザーは停電保護またはブレーキモーターを使用する必要があります。そのため、停止の目的を達成するためにブレーキ付きのギア減速モーターが選択されますが、絶対停止を意味するものではなく、若干の慣性が残ります。
セルフロックとは何ですか?セルフロックの概念は、どんなに強い力で始動できなくても、どんなに慣性があっても、能動部の動作が停止すれば機械全体が制動できるというものです。ウォームギア式ステッピングモーターは、このセルフロック性能を備えています。ギア式ステッピングモーターにはセルフロック性能はありませんが、減速比1:30以上のウォームギア減速機には信頼性の高いセルフロック性能があり、減速比が大きいほどセルフロック性能は向上します。
ウォームギア ステッピング モーターのセルフロック性能を確保するために減速比を選択するにはどうすればよいですか?
1、ウォームギアの摩擦係数は0.6、ウォームギアのガイド角度は3°29′11″未満でセルフロックし、その逆も同様です。
2、ウォームギアの摩擦係数は0.7、ウォームギアのガイド角度は4°03′57″未満でセルフロックし、逆もまた同様です。
3、ウォームホイールの摩擦係数が0.8の場合、ウォームのリード角は4°38′39″未満、つまりセルフロックであり、その逆も同様です。
ウォームのリード角が噛み合うホイールの歯間の等価摩擦角よりも小さい場合、減速ステッピングモータ機構はセルフロック機構を有し、逆セルフロック機構を実現できます。つまり、ウォームのみがウォームホイールを駆動し、ウォームホイールはウォームを駆動しません。一般的に、重機の設計では、逆セルフロック機構が安全保護において非常に重要な役割を果たすため、設計者はセルフロック機構を備えたウォームギヤ機構を使用する傾向があります。
ウォームホイールとウォームギアの計算式。
1. 伝達比 = ウォームギアの歯数 ÷ ウォームヘッドの数
2、中心距離 = (ウォームホイールピッチ + ウォームギアピッチ)÷ 2
3、ウォームホイールの直径 = (歯数 + 2) × 係数
4、ウォームホイールピッチ=モジュール×歯数
5、ウォームピッチ=ウォーム外径-2×モジュール
6、ウォームガイド = π×モジュール×ヘッド
7、ねじれ角(ガイド角)tgB=(係数×ヘッド数)÷ウォームピッチ
8、ウォームリード=π×モジュール×ヘッド
9、係数=インデックス円の直径/歯数
ウォームのヘッドの数: 単頭ウォーム (ウォームにはらせんが 1 つだけあります。つまり、ウォームは 1 週間回転し、ウォームホイールは 1 つの歯を回転します)。双頭ウォーム (ウォームにはらせんが 2 つあります。つまり、ウォームは 1 週間回転し、ウォームホイールは 2 つの歯を回転します)。
係数はネジの螺旋の大きさです。つまり、係数が大きいほど、ネジの螺旋が大きくなります。
直径係数はネジの厚さです。
係数:歯車のインデックス円は、歯車の各部品の寸法を設計および計算するための基準であり、歯車のインデックス円の円周 = πd = zpなので、インデックス円の直径は
d=zp/π
上記の式においてπは無理数であるため、基準円の位置決めには不便です。計算、製造、検査を容易にするため、現在ではp/πの比はいくつかの単純な値で人為的に規定されており、この比は係数(モジュール)と呼ばれ、mで表されます。
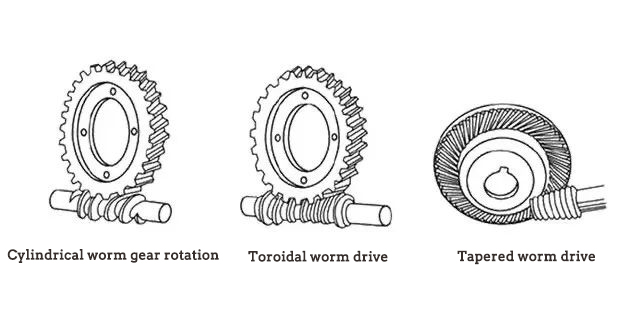
ウォームギアの種類
ウォームは形状の違いにより、円筒ウォームドライブ、環状ウォームドライブ、円錐ウォームドライブに分類されます。その中でも、円筒ウォームドライブが最も広く使用されています。
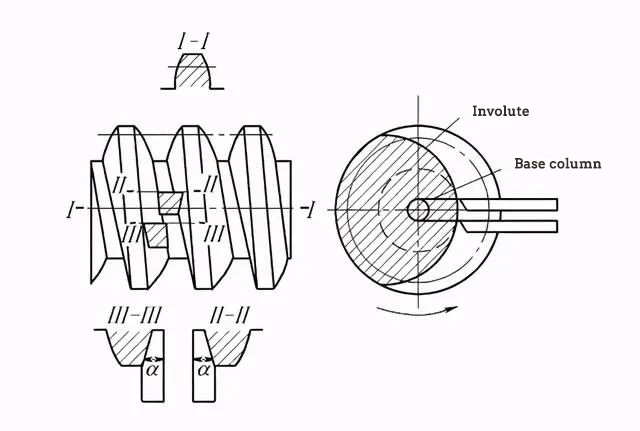
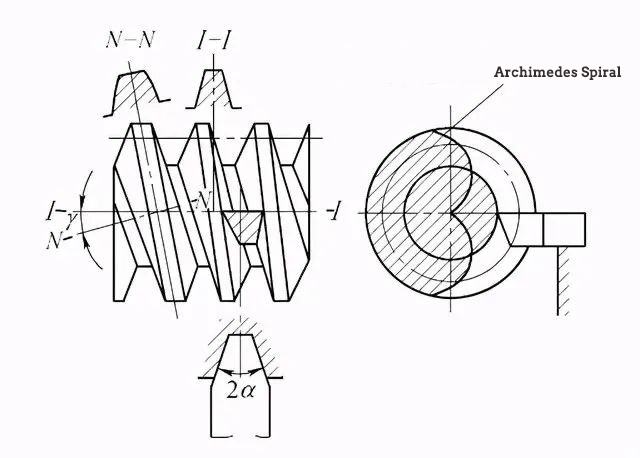
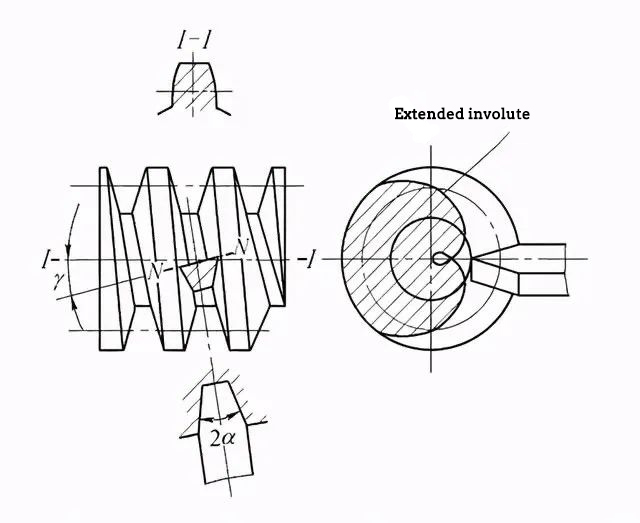
一般的な円筒ウォームギアは、主に旋盤で直線母線刃を持つ旋削工具を用いて切削されます。工具の取り付け位置と使用する工具を変えることで、垂直軸断面における歯形が異なる4種類のウォームギアが得られます。インボリュートウォームギア(ZI型)、アルキメデスウォームギア(ZA型)、通常の直線歯形ウォームギア(ZN型)、テーパ付き円筒ウォームギア(ZK型)。
インボリュートウォーム(ZI型)- ブレード面はウォームベースシリンダーに接しており、端の歯はインボリュート状になっており、より高速でより大きなパワーに適しています。
アルキメデスの虫(ZA型)- 軸平面に垂直な歯形はアルキメデスねじで、軸を越えた平面内の歯形は直線で、加工が簡単で精度が低い。(軸方向直線歯形ウォームギア)。
ノーマルストレートプロファイルワーム(ZN)- 改良された砥石で歯を研削することができ、加工が簡単で、多頭ウォームによく使用され、伝達効率は最大 0.9 になります。
トランスミッションについて簡単に理解していただければの原則ウォームギアモーター他に何か伝えたいことがあれば、お問い合わせ!
私たちはお客様と密に連携し、お客様のニーズに耳を傾け、ご要望にお応えします。Win-Winのパートナーシップの基盤は、製品の品質と顧客サービスであると考えています。
常州ヴィックテックモーターテクノロジー株式会社は、モーターの研究開発、モーターアプリケーション向け総合ソリューション、モーター製品の加工・製造を専門とする研究開発・生産組織です。2011年以来、マイクロモーターおよび関連部品の製造に特化しています。主な製品は、小型ステッピングモーター、ギアモーター、ギアドモーター、水中スラスター、モータードライバーおよびコントローラーです。

当社のチームは、マイクロモーターの設計、開発、製造において20年以上の経験を有し、お客様の特別なニーズに合わせた製品開発と設計支援が可能です。現在、当社は主に米国、英国、韓国、ドイツ、カナダ、スペインなど、アジア、北米、ヨーロッパの数百か国のお客様に販売しています。当社は「誠実さと信頼性、品質重視」の経営理念と「顧客第一」の価値規範に基づき、パフォーマンス重視の革新、協力、効率的な企業精神を提唱し、「構築と共有」の理念を確立しています。究極の目標は、お客様に最大の価値を提供することです。
投稿日時: 2023年1月30日