閉ループステッピングモーター多くのモーションコントロールアプリケーションにおける性能とコストの比率を変えました。VIC閉ループプログレッシブモータの成功は、高価なサーボモータを低コストのものに置き換える可能性も開きました。ステッピングモーター高水準の産業オートメーションアプリケーションがますます増える中で、技術の進歩によりステッピングモーターとサーボモーターの性能とコストの比率が変化しています。
ステッピングモーターとサーボモーター
一般的に、サーボ制御システムは、800 RPMを超える速度と高い動的応答が求められるアプリケーションでより優れた性能を発揮するとされています。ステッピングモーターは、低速、低~中加速度、高い保持トルクが求められるアプリケーションに適しています。
では、ステッピングモーターとサーボモーターに関するこの常識の根拠は何でしょうか?以下で詳しく分析してみましょう。
1. シンプルさとコスト
ステッピングモーターはサーボモーターよりも安価であるだけでなく、試運転やメンテナンスも容易です。ステッピングモーターは静止状態でも安定しており、(動的な負荷がかかっても)位置を保持します。しかし、特定の用途でより高い性能が求められる場合は、より高価で複雑なサーボモーターを使用する必要があります。
2. 構造
ステッピングモーター磁気コイルを用いて磁石をある位置から次の位置へと徐々に引き寄せ、段階的に回転します。モーターを任意の方向に100段階動かすには、回路上でモーターに100回のステッピング動作を実行する必要があります。ステッピングモーターはパルスを用いて段階的な動作を実現するため、フィードバックセンサーを使用せずに正確な位置決めが可能です。
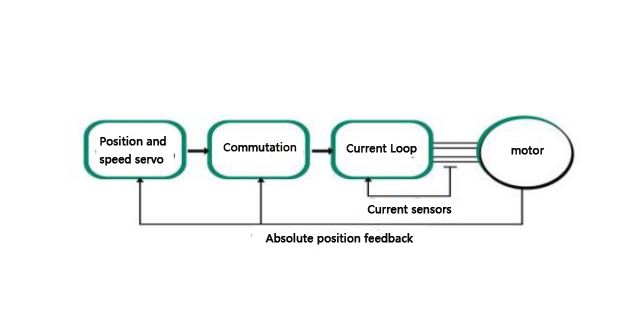
サーボモーターの動作方法は異なります。位置センサー(エンコーダなど)を磁気ローターに接続し、モーターの正確な位置を継続的に検出します。サーボはモーターの実際の位置と指令位置の差を監視し、それに応じて電流を調整します。この閉ループシステムにより、モーターは正しい動作状態を維持します。

3. 速度とトルク
ステッピング モーターとサーボ モーターのパフォーマンスの違いは、モーターの設計ソリューションの違いによって生じます。ステッピングモーターステッピングモーターはサーボモーターよりもはるかに多くの極数を持つため、1回転するにはより多くの巻線電流のやり取りが必要になり、速度が上昇するとトルクが急激に低下します。さらに、最大トルクに達すると、ステッピングモーターは速度同期機能を失う可能性があります。これらの理由から、ほとんどの高速アプリケーションではサーボモーターが最適なソリューションです。一方、ステッピングモーターの極数が多いことは、低速時にはステッピングモーターが同サイズのサーボモーターよりもトルク面で有利となる場合に有利です。
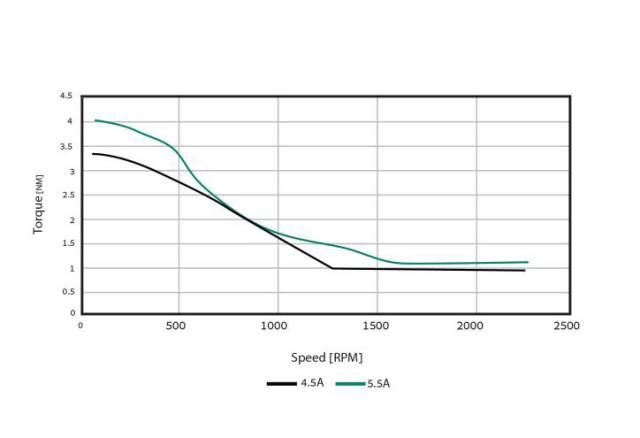
速度が上がると、ステッピングモーターのトルクは減少する。
4. ポジショニング
機械の正確な位置を常に把握する必要があるアプリケーションにおいて、ステッピングモーターとサーボモーターには重要な違いがあります。ステッピングモーターで制御されるオープンループモーションアプリケーションでは、制御システムはモーターが常に正しい動作状態にあると想定します。しかし、部品の固着によるモーターの停止など、問題が発生すると、コントローラーは機械の実際の位置を把握できなくなり、位置の喪失につながる可能性があります。一方、サーボモーター自体のクローズドループシステムには利点があります。物体に挟まれた場合、それを即座に検出します。機械は動作を停止し、位置がずれることはありません。
5. 熱とエネルギーの消費
オープンループステッピングモーターは固定電流を使用し、多くの熱を放出します。クローズドループ制御では、速度ループに必要な電流のみを供給するため、モーターの発熱の問題を回避できます。
比較の概要
サーボ制御システムは、ロボットアームなど、動的な負荷変動を伴う高速アプリケーションに最適です。一方、ステッピングモータ制御システムは、3Dプリンター、コンベア、サブ軸など、低~中程度の加速度と高い保持トルクを必要とするアプリケーションに適しています。ステッピングモータは安価であるため、自動化システムのコストを削減できます。サーボモータの特性を活用するモーション制御システムでは、これらの高コストモータの価値を証明する必要があります。
閉ループ制御ステッピングモーター
電子制御を内蔵したステッピングモーターは、2相ブラシレスDCモーターと同等の機能を持ち、位置ループ制御、速度ループ制御、DQ制御などのアルゴリズムを実行できます。閉ループ整流にはシングルターンアブソリュートエンコーダを使用し、あらゆる速度で最適なトルクを保証します。
低消費電力で涼しく保つ
VICステッピングモーターはエネルギー効率に優れています。常に最大電流指令で動作し、発熱や騒音の問題を引き起こすオープンループステッピングモーターとは異なり、電流は実際の動作状況、例えば加速時や減速時などに応じて変化します。サーボモーターと同様に、VICステッピングモーターの消費電流は、常に必要なトルクに比例します。モーターと内蔵電子制御ボードの発熱が少ないため、VICステッピングモーターはサーボモーターに匹敵する高いピークトルクを実現できます。
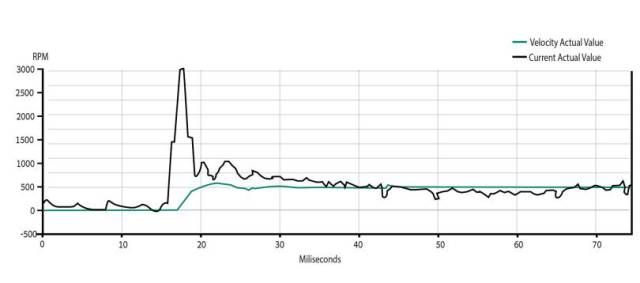
VICステッピングモーターは高速でも電流が少なくて済む
閉ループ技術の進歩により、ステッピングモータは、これまでサーボモータのみに限られていた高性能、高速アプリケーションに浸透できるようになりました。
閉ループ技術を採用したステッピングモーター
閉ループサーボ技術の利点をステッピングモーターに適用できたらどうなるでしょうか?
ステッピングモーターのコスト上の利点を維持しながら、サーボモーターと同等のパフォーマンスを実現できるでしょうか?
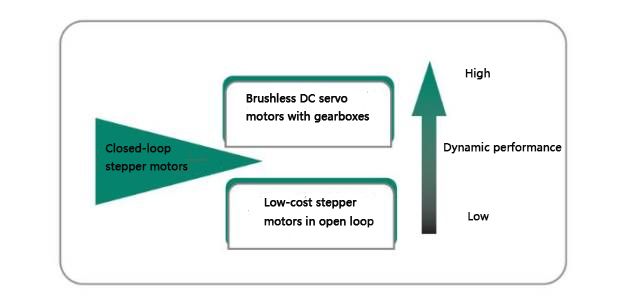
閉ループ制御技術を組み合わせることで、ステッピングモーターはサーボモーターとステッピングモーターの両方の利点を低コストで備えた総合的な製品となります。閉ループステッピングモーターは性能とエネルギー効率を大幅に向上させるため、ますます多くの高水準アプリケーションにおいて、より高価なサーボモーターの代替として採用される可能性があります。
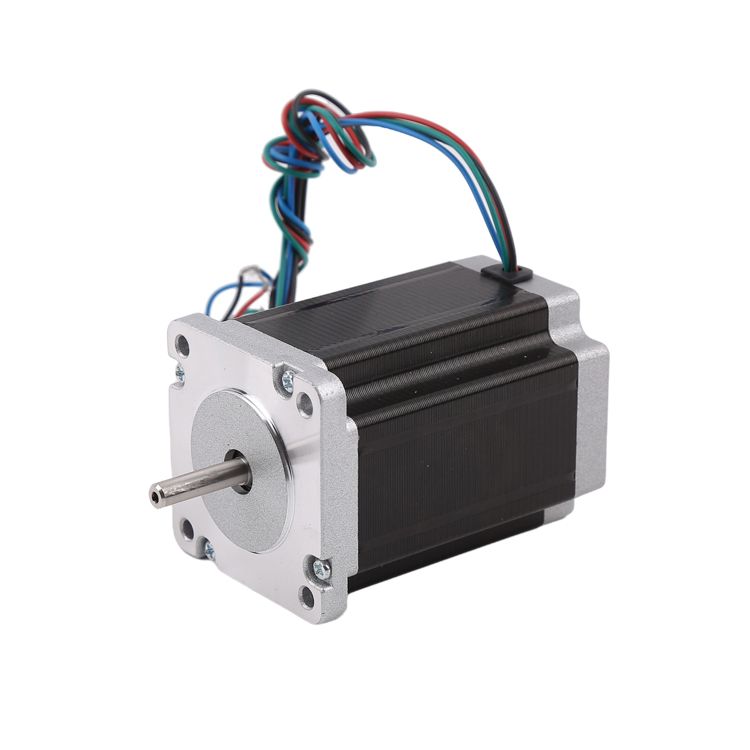
以下は、クローズドループ制御を組み込んだ VIC 統合ステッピング モーターの例であり、クローズドループ テクノロジを備えたステッピング モーターのパフォーマンスと利点および欠点を説明します。
正確に一致したパフォーマンス要件
外乱を克服し、ステップロスを回避するために十分なトルクを確保するため、オープンループステッピングモーターは通常、アプリケーションで要求される値よりも少なくとも40%高いトルクを確保する必要があります。一方、クローズドループステッピングモーターではこの問題は発生しません。これらのステッピングモーターは、過負荷により停止した場合でも、トルクを失うことなく負荷を保持し続けます。過負荷状態が解除された後も動作を継続します。任意の速度で最大トルクを保証でき、位置センサーがステップロスの発生を防ぎます。したがって、クローズドループステッピングモーターは、40%のマージンを追加することなく、アプリケーションのトルク要件に正確に一致するように仕様を規定できます。
オープンループステッピングモーターでは、ステップロスのリスクがあるため、高い瞬間トルク要件を満たすことが困難です。従来のステッピングモーターと比較して、VICクローズドループステッピングモーターは、非常に高速な加速、低い動作ノイズ、低い共振を実現できます。また、はるかに高い帯域幅で動作し、優れた性能を発揮します。
キャビネットなし
Todaは駆動制御基板とモーターを統合することで、配線量を削減し、実装ソリューションを簡素化します。これにより、キャビネットなしで機械を構築できます。
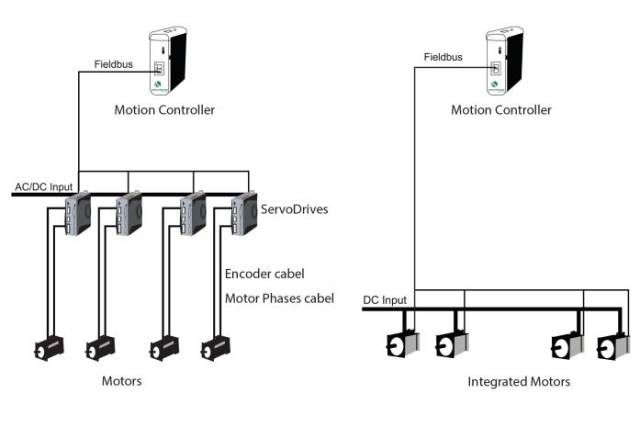
電子機器とステッピングモーターを統合することで複雑さが軽減されます
クローズドループ技術を採用したクローズドループステッピングモーターは、サーボモーターの性能とステッピングモーターの低コストを兼ね備え、優れた精度と効率を実現します。低コストのステッピングモーターは、これまでは高価なサーボモーターが主流だったアプリケーションにも徐々に浸透しつつあります。
投稿日時: 2023年4月10日