閉ループステッピングモーター多くのモーションコントロールアプリケーションにおいて、性能対コスト比が変化しました。VICクローズドループプログレッシブモーターの成功により、高価なサーボモーターを低コストのモーターに置き換える可能性も開かれました。ステッピングモーター高度な産業オートメーション用途において、技術の進歩により、ステッピングモーターとサーボモーターの性能対コスト比が変化しつつある。
ステッピングモーターとサーボモーターの比較
一般的に、サーボ制御システムは、800 RPMを超える速度と高い動的応答が求められる用途において優れた性能を発揮する。一方、ステッピングモーターは、低速、低~中程度の加速度、および高い保持トルクが求められる用途に適している。
では、ステッピングモーターとサーボモーターに関するこの通説の根拠は何でしょうか?以下でさらに詳しく分析してみましょう。
1. シンプルさとコスト
ステッピングモーターはサーボモーターよりも安価なだけでなく、設置やメンテナンスも容易です。ステッピングモーターは静止状態でも安定しており、動的な負荷がかかっても位置を保持します。ただし、特定の用途でより高い性能が求められる場合は、より高価で複雑なサーボモーターを使用する必要があります。
2. 構造
ステッピングモーターステッピングモーターは、磁気コイルを使用して磁石をある位置から次の位置へと徐々に引き寄せることで、段階的に回転します。モーターを任意の方向に100ポジション移動させるには、回路はモーターに対して100回のステップ動作を実行する必要があります。ステッピングモーターはパルスを使用して段階的な動きを実現するため、フィードバックセンサーを使用せずに正確な位置決めが可能です。
サーボモーターの動作方式は異なります。位置センサー(エンコーダー)を磁気ローターに接続し、モーターの正確な位置を継続的に検出します。サーボモーターは、モーターの実際の位置と指令された位置との差を監視し、それに応じて電流を調整します。この閉ループシステムにより、モーターは常に正しい動作状態を維持します。

3. 速度とトルク
ステッピングモーターとサーボモーターの性能差は、それぞれのモーター設計の違いに起因する。ステッピングモーターステッピングモーターはサーボモーターよりも極数がはるかに多いため、1回転するにはより多くの巻線電流の交換が必要となり、速度が上がるにつれてトルクが急激に低下します。さらに、最大トルクに達すると、ステッピングモーターは速度同期機能を失う可能性があります。これらの理由から、ほとんどの高速アプリケーションではサーボモーターが好ましいソリューションとなります。一方、ステッピングモーターの極数が多いことは、低速域では有利であり、同じサイズのサーボモーターよりもトルク面で優位性があります。
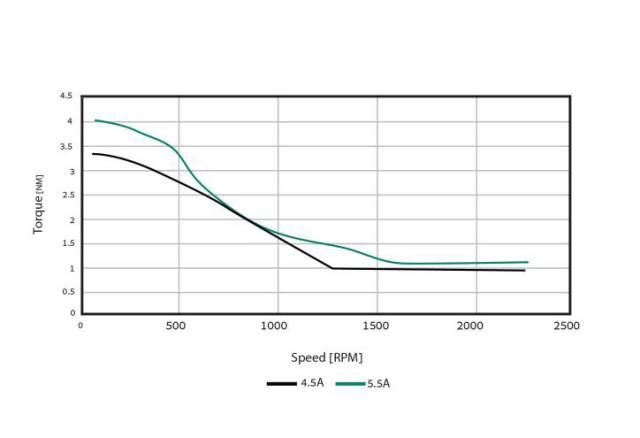
速度が上がると、ステッピングモーターのトルクは減少する。
4. ポジショニング
機械の正確な位置を常に把握する必要がある用途では、ステッピングモーターとサーボモーターには重要な違いがあります。ステッピングモーターで制御されるオープンループモーションアプリケーションでは、制御システムはモーターが常に正しい動作状態にあると想定しています。しかし、部品の詰まりによるモーターの停止など、問題が発生すると、コントローラーは機械の実際の位置を把握できなくなり、位置ずれが発生する可能性があります。一方、サーボモーターのクローズドループシステムには利点があります。物体がモーターに詰まった場合、すぐにそれを検知します。機械は動作を停止し、位置ずれを起こすことはありません。
5. 熱とエネルギーの消費
オープンループ制御のステッピングモーターは一定の電流を使用するため、多くの熱を発生します。一方、クローズドループ制御では速度ループに必要な電流のみを供給するため、モーターの過熱問題を回避できます。
比較概要
サーボ制御システムは、ロボットアームなど、動的な負荷変動を伴う高速アプリケーションに最適です。一方、ステッピング制御システムは、3Dプリンター、コンベア、サブアクスルなど、低~中程度の加速度と高い保持トルクを必要とするアプリケーションに適しています。ステッピングモーターは安価であるため、使用することで自動化システムのコストを削減できます。サーボモーターの特性を活用する必要のあるモーション制御システムは、これらの高価なモーターがその価値に見合うものであることを証明しなければなりません。
閉ループ制御付きステッピングモーター
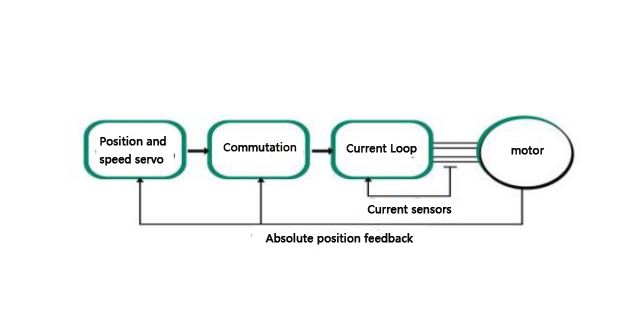
電子制御機能を内蔵したステッピングモーターは、2相ブラシレスDCモーターと同等の性能を持ち、位置ループ制御、速度ループ制御、DQ制御などのアルゴリズムを実行できます。閉ループ整流にはシングルターンアブソリュートエンコーダーが使用されており、あらゆる速度で最適なトルクを確保します。
低エネルギー消費で涼しさを保つ
VICステッピングモーターは、非常に高いエネルギー効率を誇ります。常に最大電流指令で動作し、発熱や騒音の問題を引き起こすオープンループステッピングモーターとは異なり、VICステッピングモーターは、加速時や減速時など、実際の動作状況に応じて電流が変化します。サーボモーターと同様に、これらのステッピングモーターが消費する電流は、必要なトルクに比例します。モーターと内蔵の電子制御基板が低温で動作するため、VICステッピングモーターはサーボモーターに匹敵する高いピークトルクを実現できます。
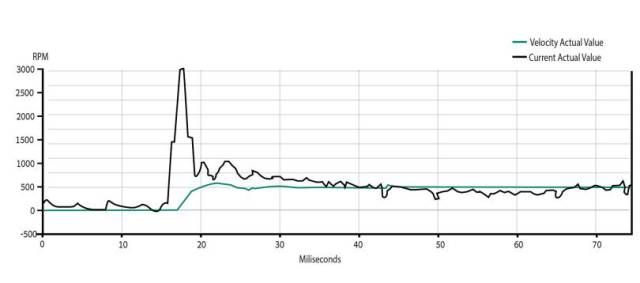
VICステッピングモーターは、高速回転時でも消費電流が少ない。
クローズドループ技術の進歩により、ステッピングモーターは、これまでサーボモーターのみが担ってきた高性能・高速アプリケーションへの進出が可能になった。
クローズドループ制御技術を採用したステッピングモーター
クローズドループサーボ技術の利点をステッピングモーターに応用できたらどうだろうか?
ステッピングモーターのコストメリットを維持しながら、サーボモーターと同等の性能を実現することは可能でしょうか?
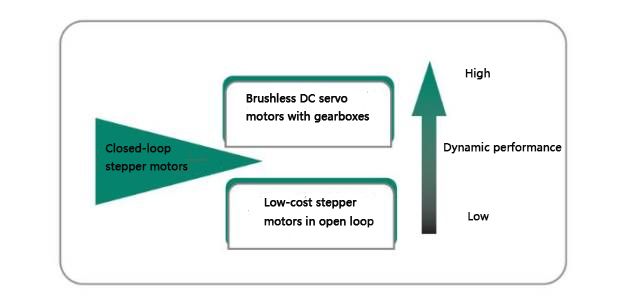
閉ループ制御技術を組み合わせることで、ステッピングモーターはサーボモーターとステッピングモーターの両方の利点を低コストで兼ね備えた総合的な製品となる。閉ループステッピングモーターは性能とエネルギー効率が大幅に向上するため、ますます多くの高水準な用途において、より高価なサーボモーターの代替として採用されるようになるだろう。
以下は、閉ループ制御機能を内蔵したVIC統合型ステッピングモーターの例であり、閉ループ制御技術を採用したステッピングモーターの性能、利点、欠点を説明するために用いられます。
性能要件に正確に合致
外乱を克服し、ステップロスを回避するために十分なトルクを確保するには、オープンループステッピングモーターでは通常、アプリケーションで要求される値よりも少なくとも40%高いトルクを確保する必要があります。一方、クローズドループtodaステッピングモーターにはこの問題はありません。これらのステッピングモーターは、過負荷によって停止した場合でも、トルクを失うことなく負荷を保持し続けます。過負荷状態が解消された後も動作を継続します。任意の速度で最大トルクが保証され、位置センサーによってステップロスが発生しないことが保証されます。したがって、クローズドループステッピングモーターは、40%のマージンを追加することなく、該当するアプリケーションのトルク要件に正確に適合するように指定できます。
オープンループステッピングモーターでは、ステップロスが発生するリスクがあるため、高い瞬間トルク要件を満たすことが困難です。一方、VICクローズドループステッピングモーターは、従来のステッピングモーターに比べて、非常に高速な加速、低動作ノイズ、低共振を実現できます。また、より広い帯域幅で動作し、優れた性能を発揮します。
キャビネットなし
Todaは駆動制御基板とモーターを一体化することで、配線量を削減し、実装ソリューションを簡素化します。Todaを使えば、キャビネットのない機械を構築できます。
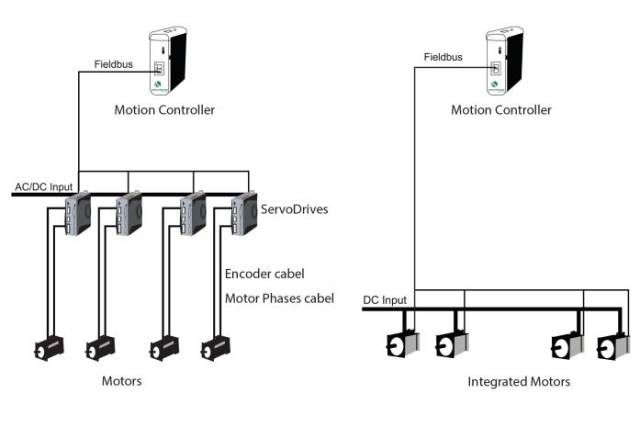
ステッピングモーターに電子部品を組み込むことで、複雑さが軽減される。
クローズドループ技術を採用したクローズドループステッピングモーターは、サーボモーター並みの性能とステッピングモーターの低コストを両立させ、優れた精度と効率性を実現します。低価格のステッピングモーターは、従来は高価格のサーボモーターが主流だった分野にも徐々に浸透しつつあります。
投稿日時:2023年4月10日