



20mmPMマイクロリニアステッピングモーター12VDCキャプティブ高精度リニアモーター
ビデオ
説明
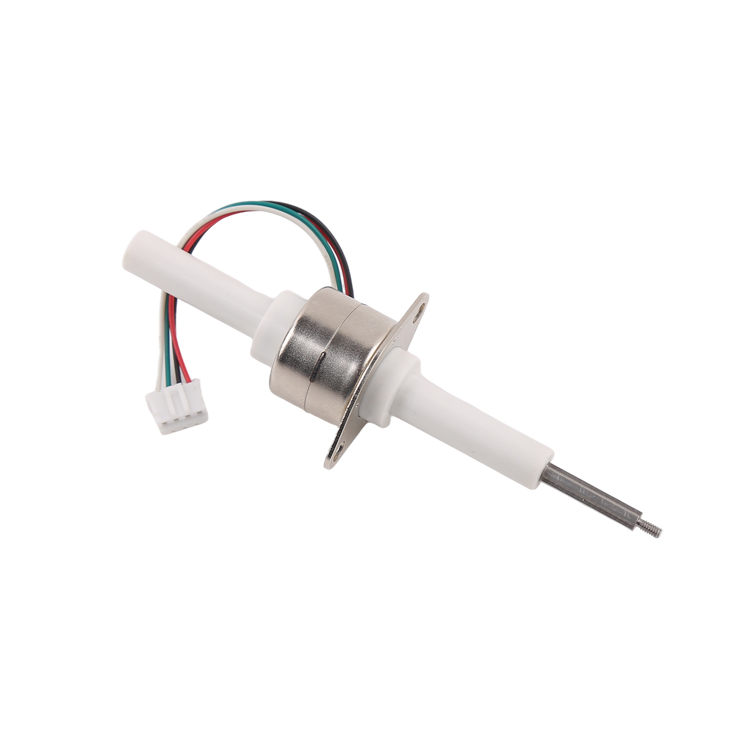
SM20-020L-LINEAR SERIALは、ガイドスクリュー付きのステッピングモーターです。ローターが時計回りまたは反時計回りに回転すると、ガイドスクリューが前進または後退します。
ステッピングモータのステップ角は7.5度、リード間隔は0.6096mmです。ステッピングモータが1ステップ回転すると、リードは0.0127mm移動します。
この製品は当社の特許取得製品であり、モーターの回転をインナーローターとスクリューの相対運動を介して直線運動に変換します。主にバルブ制御、自動ボタン、医療機器、繊維機械、ロボットなどの関連分野で使用されています。
同時に、外部配線部分は通常、接続線とコンセントボックスであり、裸針も顧客のニーズに応じてカスタマイズできます。
弊社のチームはステッピングモーターの設計、開発、製造において10年以上の経験を有しており、お客様の特殊なニーズに合わせた製品開発や補助設計を実現できます。
お客様のご要望にお応えできるよう努力しておりますので、お気軽にお問い合わせください!

パラメータ
| 製品名 | PM20 5V リニアステッピングモーター |
| モデル | VSM20L-048S-0508-32-01 |
| 抵抗 | 13Ω±10% |
| 引き込み周波数 | 670PPS |
| マーク・スラスト | 600グラム |
| インダクタンス | 4.5REF(mH) |
| 取り付け開口部 | φ3.7mm(貫通穴) |
| 軸方向の高さ | 25.9ミリメートル |
| 断熱等級 | クラスE |
| リード線 | UL 1061 AWG26 |
| OEM & ODMサービス | 利用可能 |
設計図
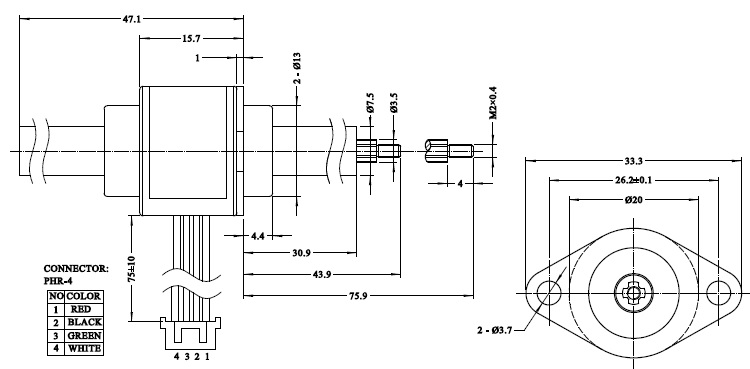
モーターのパラメータと仕様
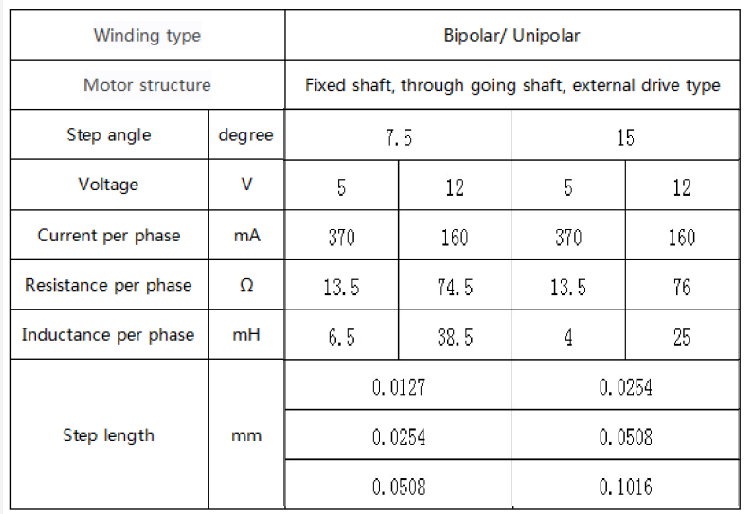
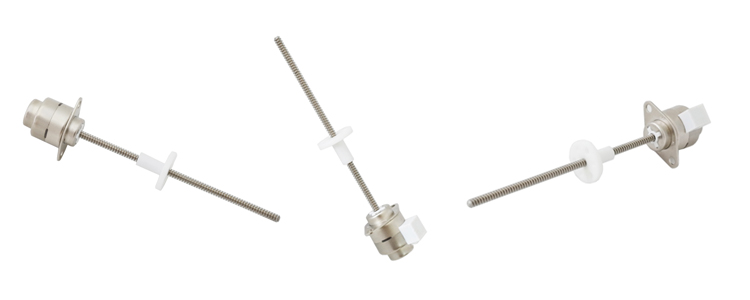
捕虜

非捕虜

外部の
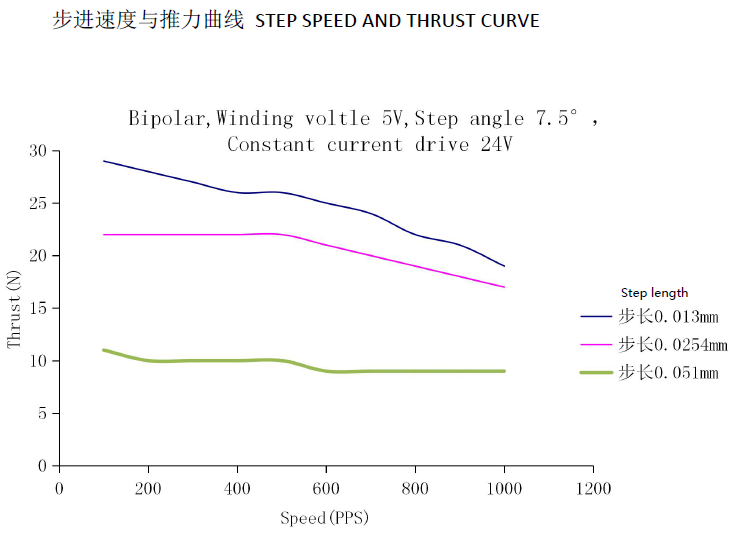
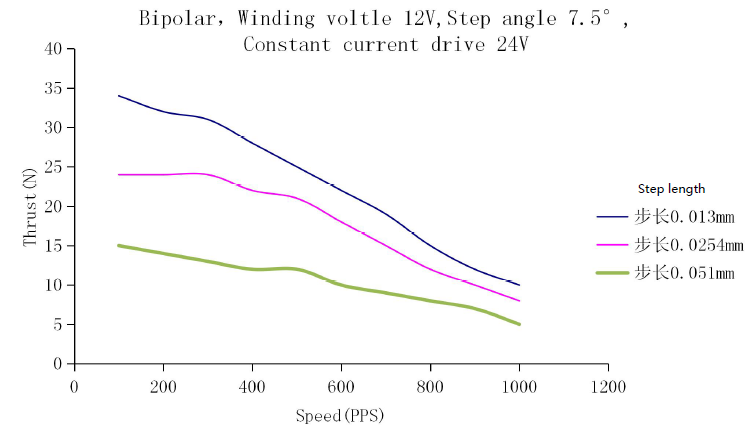
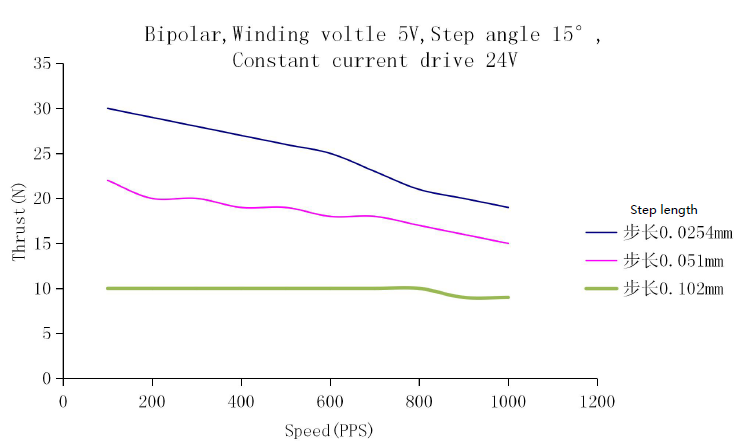
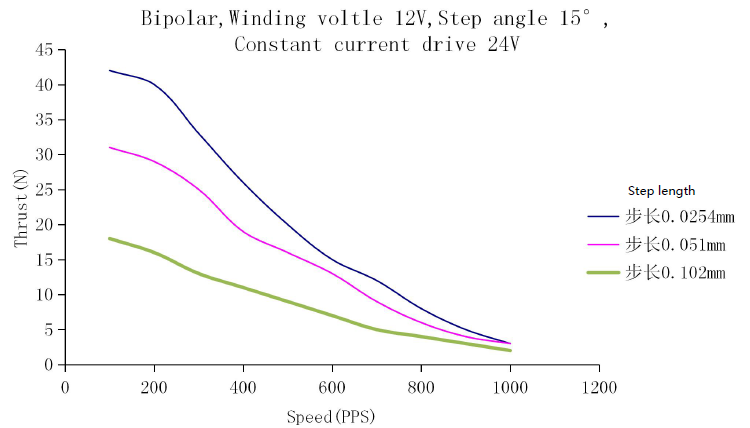
ステップ速度と推力曲線
応用
カスタマイズサービス
モーターは通常のスクリューストロークをカスタマイズできます。
コネクタとコンセントボックスは顧客の要件に応じてカスタマイズできます
ネジロッドはナットをカスタマイズすることもできます
リードタイムと梱包情報
サンプルのリードタイム:
標準モーターの在庫:3日以内
標準モーターの在庫がない場合:15日以内
カスタマイズ製品: 約25~30日(カスタマイズの複雑さによります)
新しい金型を作るためのリードタイム:通常約45日
大量生産のリードタイム:注文数量に基づく
パッケージ:
サンプルは発泡スポンジと紙箱に梱包され、速達で発送されます。
大量生産のため、モーターは外側に透明フィルムを貼った段ボール箱に梱包されます。(航空便による配送)
海上輸送の場合、製品はパレットに梱包されます

配送方法
サンプルと航空輸送には、Fedex/TNT/UPS/DHL を使用します。(速達の場合は5~12日)
海上輸送の場合、弊社の運送代理店を利用して上海港から発送します。(海上輸送の場合45~70日)
よくある質問
1.貴社はメーカーですか?
はい、当社は製造会社であり、主にステッピングモーターを生産しています。
2. 工場はどこですか?工場見学は可能ですか?
当社の工場は江蘇省常州市にあります。ぜひご訪問ください。
3.無料サンプルを提供できますか?
いいえ、無料サンプルは提供しておりません。お客様は無料サンプルを公平に扱わないからです。
4.送料は誰が支払いますか?自分の配送アカウントは使えますか?
送料はお客様のご負担となります。送料のお見積もりをさせていただきます。
より安価で便利な配送方法があると思われる場合は、その配送アカウントをご利用いただけます。
5.最小注文数量はいくらですか?モーターは1個から注文できますか?
当社には最小注文数量の制限はなく、サンプルは 1 個のみご注文いただけます。
ただし、テスト中にモーターが損傷した場合に備えて、バックアップを用意できるように、少し多めに注文することをお勧めします。
6. 新しいプロジェクトを開発中ですが、カスタマイズサービスはありますか?また、秘密保持契約を締結することは可能ですか?
当社はステッピングモーター業界で 20 年以上の経験を持っています。
当社は数多くのプロジェクトを開発しており、設計図から製造までフルセットのカスタマイズを提供できます。
私たちは、ステッピング モーター プロジェクトに関するアドバイスや提案をいくつか提供できると確信しています。
機密事項が心配な場合は、NDA契約を締結することも可能です。
7.ドライバーを販売していますか?また、生産していますか?
はい、ドライバーは販売しております。一時的なサンプルテストにのみ適しており、量産には適していません。
当社はドライバーを製造しておらず、ステッピングモーターのみを製造しています。
よくある質問
1.ステッピングモーターの発熱を抑える方法:
発熱を抑えるには、銅損と鉄損を減らすことが重要です。銅損の低減は、抵抗と電流の2つの方向から行われます。そのため、モーター、特に二相モーターの場合は、抵抗が小さく、定格電流が可能な限り小さいモーターを選択する必要があります。並列接続せずに直列接続でモーターを使用することができます。しかし、これはしばしばトルクと高速回転の要件と矛盾します。選択したモーターに対して、ドライブの自動半電流制御機能とオフライン機能を最大限に活用する必要があります。前者はモーター停止時に自動的に電流を低減し、後者は電流を遮断します。さらに、分割駆動では電流波形が正弦波に近くなるため、高調波が少なくなり、モーターの発熱も少なくなります。鉄損を低減する方法はいくつかありますが、電圧レベルはそれに関連しています。高電圧で駆動するモーターは高速特性が向上しますが、発熱も増加します。そのため、高速性、滑らかさ、発熱、騒音などの指標を考慮して、適切なドライブ電圧レベルを選択する必要があります。
2.ステッピングモーターの原理:
ステッピングモーターの速度はドライバによって制御され、コントローラ内の信号発生器がパルス信号を生成します。送信するパルス信号の周波数を制御することで、モーターがパルス信号を受信したときに1ステップ(全ステップ駆動のみを考慮します)移動し、モーターの速度を制御できます。
3.ステッピングモーターの速度に影響を与える要因は何ですか?
ステッピング モーターの速度は、ドライバ周波数、ステッピング モーターのステップ角度、およびギアボックスによって決まります。





