.jpg)
.jpg)
.jpg)
.jpg)
NEMA 34 (86mm) ハイブリッドステッピングモーター、バイポーラ、4リード、ACMEリードスクリュー、低騒音、長寿命、フォーマカル機器
説明
この86mmハイブリッドステッピングモーターは、外部駆動式、軸貫通式、軸固定式の3種類からお選びいただけます。お客様のニーズに合わせてお選びください。
ACMEリードスクリュー式ステッピングモーターは、リードスクリューを用いて回転運動を直線運動に変換します。リードスクリューは、さまざまな用途の要件を満たすために、直径とリードのさまざまな組み合わせがあります。
リードスクリュー式ステッピングモーターは、医療機器や通信機器など、精密な直線運動、低騒音、高コスト効率が求められる用途で一般的に使用されます。
ThinkerMotionは、負荷範囲30N~2400Nのリードスクリュー式ステッピングモーター(NEMA 8、NEMA11、NEMA14、NEMA17、NEMA23、NEMA24、NEMA34)を幅広く取り揃えており、外部式、固定式、非固定式の3種類をご用意しています。スクリューの長さや先端形状、磁気ブレーキ、エンコーダ、バックラッシュ防止ナットなど、ご要望に応じてカスタマイズも可能です。また、リードスクリューにテフロンコーティングを施すこともできます。

説明
| 製品名 | 86mmハイブリッドステッピングモーター |
| モデル | VSM86HSM |
| タイプ | ハイブリッドステッピングモーター |
| ステップ角度 | 1.8° |
| 電圧(V) | 3/4.8 |
| 電流(A) | 6 |
| 抵抗値(オーム) | 0.5/0.8 |
| インダクタンス(mH) | 4/8.5 |
| リード線 | 4 |
| モーターの長さ(mm) | 76/114 |
| 周囲温度 | -20℃~+50℃ |
| 気温上昇 | 最大80K。 |
| 誘電強度 | 最大1mA @ 500V、1KHz、1秒 |
| 絶縁抵抗 | 100MΩ以上(500Vdc時) |
資格認定

電気的パラメータ:
| モーターサイズ | 電圧 /段階 (V) | 現在 /段階 (A) | 抵抗 /段階 (Ω) | インダクタンス /段階 (mH) | 数 リード線 | ローター慣性 (g.cm2) | モーター重量 (g) | モーターの長さL (mm) |
| 86 | 3 | 6 | 0.5 | 4 | 4 | 1300 | 2400 | 76 |
| 86 | 4.8 | 6 | 0.8 | 8.5 | 4 | 2500 | 5000 | 114 |
リードスクリューの仕様と性能パラメータ
| 直径 (mm) | 鉛 (mm) | ステップ (mm) | 電源オフ時のセルフロック力 (N) |
| 15.875 | 2.54 | 0.0127 | 2000 |
| 15.875 | 3.175 | 0.015875 | 1500 |
| 15.875 | 6.35 | 0.03175 | 200 |
| 15.875 | 12.7 | 0.0635 | 50 |
| 15.875 | 25.4 | 0.127 | 20 |
注:リードスクリューの仕様に関する詳細は、お問い合わせください。
VSM86HSM標準外部モータ外形図
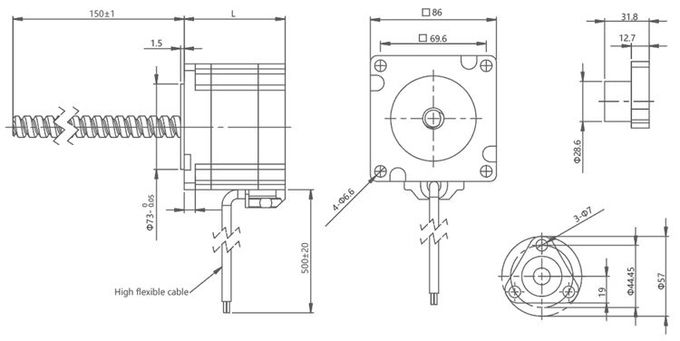
注記:
リードスクリューの長さはカスタマイズ可能です
リードスクリューの端部でのカスタム加工は可能です
86mmハイブリッドステッピングモーター標準キャプティブモーター外形図:
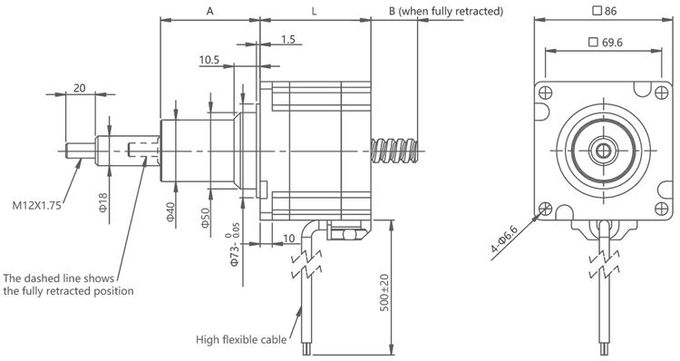
注記:
リードスクリューの端部でのカスタム加工は可能です
| ストロークS (mm) | 寸法A (mm) | 寸法B(mm) | |
| L = 76 | L = 114 | ||
| 12.7 | 29.7 | 0 | 0 |
| 19.1 | 36.1 | 2.1 | 0 |
| 25.4 | 42.4 | 8.4 | 0 |
| 31.8 | 48.8 | 14.8 | 0 |
| 38.1 | 55.1 | 21.1 | 0 |
| 50.8 | 67.8 | 33.8 | 0 |
| 63.5 | 80.5 | 46.5 | 8.5 |
86mmハイブリッドステッピングモーター標準貫通固定モーター外形図
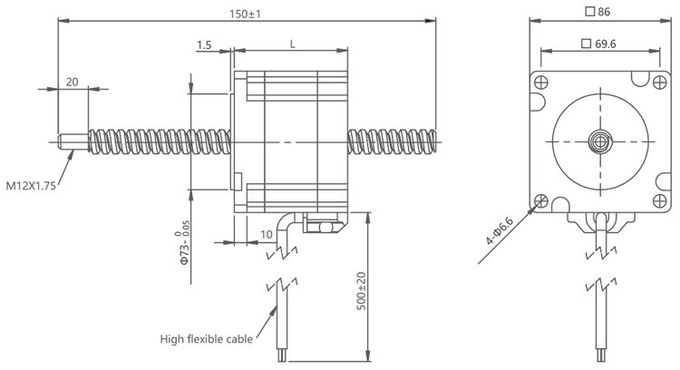
注記:
リードスクリューの長さはカスタマイズ可能です
リードスクリューの端部でのカスタム加工は可能です
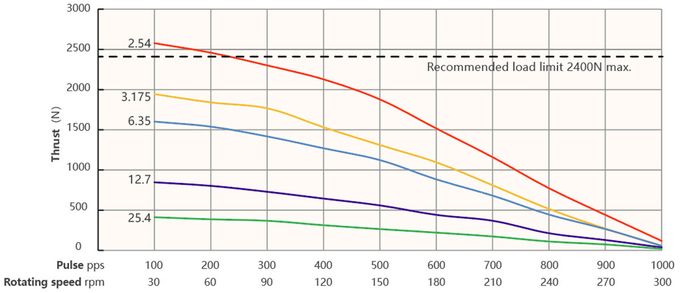
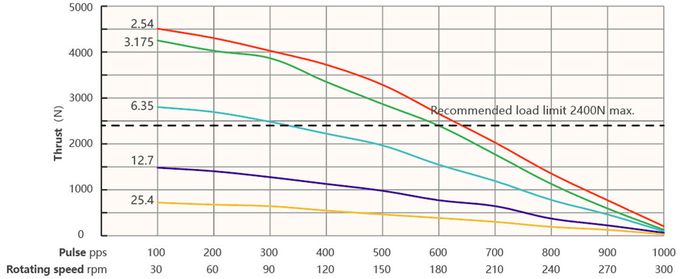
速度と推力の曲線:
86シリーズ 76mmモーター長 バイポーラチョッパードライブ
100%電流パルス周波数および推力曲線(Φ15.88mmリードスクリュー)
86シリーズ 114mmモーター長 バイポーラチョッパードライブ
100%電流パルス周波数および推力曲線(Φ15.88mmリードスクリュー)
| 鉛(mm) | 線速度(mm/秒) | |||||||||
| 2.54 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 | 12.7 |
| 3.175 | 1.5875 | 3.175 | 4.7625 | 6.35 | 7.9375 | 9.525 | 11.1125 | 12.7 | 14.2875 | 15.875 |
| 6.35 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 | 31.75 |
| 12.7 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 | 63.5 |
| 25.4 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 | 127 |
試験条件:
チョッパ駆動、ランプ動作なし、ハーフマイクロステップ、駆動電圧40V
応用分野
CNC工作機械:86mmハイブリッドステッピングモーターは、CNC工作機械において切削工具の動きと位置を制御し、高精度な加工を実現するために広く使用されています。
自動化機器:86mmハイブリッドステッピングモーターは、自動包装機、自動選別システム、自動生産ラインなど、さまざまな自動化機器において、動作制御や位置決め制御に使用できます。
3Dプリンティング:3Dプリンティングの分野では、86mmハイブリッドステッピングモーターがプリントヘッドの位置と動きを制御し、精密な印刷操作を実現するために使用されています。
医療機器:86mmハイブリッドステッピングモーターは、医療用シリンジポンプ、医療用ロボット、医療用スキャン装置など、医療機器において精密な位置制御や動作制御のために広く使用されています。
通信機器:86mmハイブリッドステッピングモーターは、通信アンテナの位置決めシステムや光ファイバー機器の精密制御など、通信機器における精密な位置決めと制御に使用できます。
繊維機械:繊維産業では、86mmハイブリッドステッピングモーターを使用して、紡績機、織機、その他の機器を制御し、繊維製造工程の精度と安定性を確保することができます。
ロボット工学:86mmハイブリッドステッピングモーターは、産業用ロボット、サービスロボット、協働ロボットなど、さまざまなロボット用途において、精密な動作と操作を実現するために使用できます。
自動倉庫システム:自動倉庫および物流システムにおいて、86mmハイブリッドステッピングモーターは、コンベアベルト、エレベーター、スタッカー、その他の機器を制御するために使用され、物品の正確な位置決めと取り扱いを実現します。
アドバンテージ
滑らかで正確な動作:86mmハイブリッドステッピングモーターは、その優れたステップ分解能により、滑らかで精密な動作を実現します。これにより、正確な位置決めとスムーズな動きが可能になり、振動のリスクを低減し、高品質な性能を保証します。
低速域で高トルクを発揮:ハイブリッドステッピングモーターは、低速時でも高いトルク出力を発揮するため、強力な保持トルクや始動トルクを必要とする用途に適しています。この特性は、モーターが外部からの力に抗して位置を維持する必要がある場合に特に有利です。
幅広いステップ分解能:86mmハイブリッドステッピングモーターは、幅広いステップ分解能を提供し、動作の精密な制御を可能にします。マイクロステッピング技術を用いることで、モーターは各ステップをより小さなサブステップに分割することができ、より滑らかな動作と位置精度の向上を実現します。
駆動と制御が容易:ハイブリッドステッピングモーターは、パルス信号と方向信号を用いるシンプルな駆動・制御アーキテクチャを採用しています。そのため、様々な制御システムへの統合が容易で、複雑さを軽減し、開発時間を短縮できます。
高い信頼性と耐久性:86mmハイブリッドステッピングモーターは、その堅牢性と長寿命で知られています。温度変化や機械的ストレスといった厳しい動作条件下でも、性能を損なうことなく耐えることができます。
費用対効果の高いソリューション:ハイブリッドステッピングモーターは、サーボモーターなどの他のモーションコントロール技術と比較して、コスト効率に優れたソリューションを提供します。性能とコストのバランスが良く、予算が重要な用途に適しています。
多用途なアプリケーション:86mmハイブリッドステッピングモーターは、ロボット工学、自動化、製造、3Dプリンティング、医療機器など、さまざまな産業分野で活用されています。その汎用性の高さから、精密な位置決めと制御が求められる幅広い用途に対応可能です。
モーター選定要件:
►移動/取り付け方向
►負荷要件
►脳卒中要件
►エンド加工要件
►精度要件
►エンコーダーフィードバック要件
►手動調整要件
►環境要件
生産工場


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)