




28mm永久磁石ギアボックスステッピングモーターカバーはカスタマイズ可能
説明
これは直径28mmのpm減速ステッピングモーターで、摩擦クラッチ付き出力ギアです。
このモーターのギア比は16:1、25:1、32:1、48.8:1、64:1、85:1です。
モーターはステップ角が5.625°/64で、1-2相励磁または2-2相励磁で駆動されます。
定格電圧: 5VDC; 12VDC; 24VDC
モーター接続線およびコネクタ線仕様UL1061 26AWGまたはUL2464 26AWG、
このモーターは主に衛生陶器、サーモスタットバルブ、温水蛇口、スマートトイレ、エアコン、水温と流量の自動調整、ドアロック、浄水器、一連の家電製品に使用されます。
また、精密な制御が求められる他の分野にも適用可能です。オープンループ制御の実現により、低コストな位置制御を実現します。
この製品は生産量が多いため、他の製品よりも価格が低くなる可能性があります。
また、フェイスにはギアが付いていますが、一般的なギアの材質は POM(プラスチック)ですが、金属製のギアに交換することもできますが、コストが増加します。
弊社の製品にご興味がございましたら、いつでもご連絡ください。

パラメータ
| 電圧(V) | 抵抗(Ω) | 引き込みトルク 100PPS(mN*m) | ディテントトルク(mN*m) | アンロードプルイン周波数(PPS) |
| 5 | 18 | ≥98 | ≥29.4 | ≥500 |
| 12 | 60 | ≥117 | ≥29.4 | ≥500 |
| 12 | 70 | ≥68.7 | ≥29.4 | ≥500 |
| 24 | 200 | ≥68.7 | ≥29.4 | ≥500 |
| 24 | 300 | ≥58.8 | ≥29.4 | ≥500 |
設計図:出力軸カスタマイズ可能
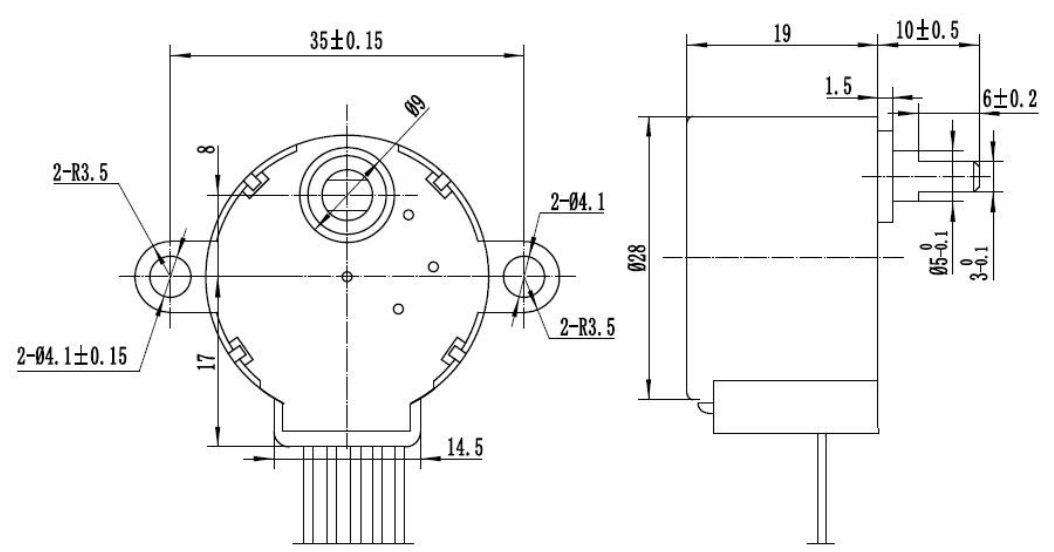
カスタマイズ可能なアイテム
ギア比、
電圧:5-24V、
ギア材質、
出力軸、
モーターのキャップデザインはカスタマイズ可能
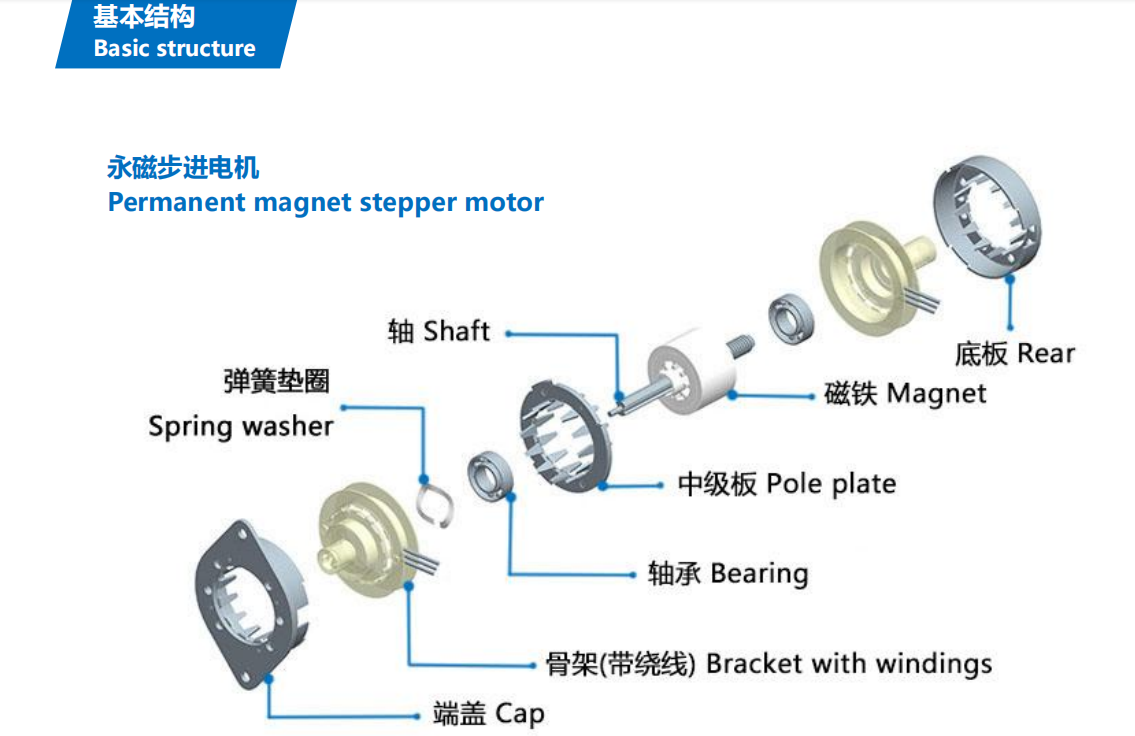
PMステッピングモータの基本構造について
特徴と利点
1. 高精度な位置決め
ステッパーは正確な繰り返しステップで動くため、精密な動作が求められる用途に最適です。
モーターが移動するステップ数による位置決め
2. 高精度な速度制御
正確な動きの増分により、プロセスの回転速度を優れた制御できます。
自動化とロボット工学。回転速度はパルスの周波数によって決まります。
3. 一時停止と保持機能
ドライブの制御により、モーターはロック機能を持ちます(モーター巻線に電流が流れますが、
(モーターは回転しませんが)保持トルク出力はまだあります。
4. 長寿命と低電磁干渉
ステッピングモーターにはブラシがないので、ブラシ付きモーターのようにブラシで整流する必要がない。
DCモーター。ブラシの摩擦がないため、寿命が延び、電気火花が発生しず、電磁干渉も低減します。
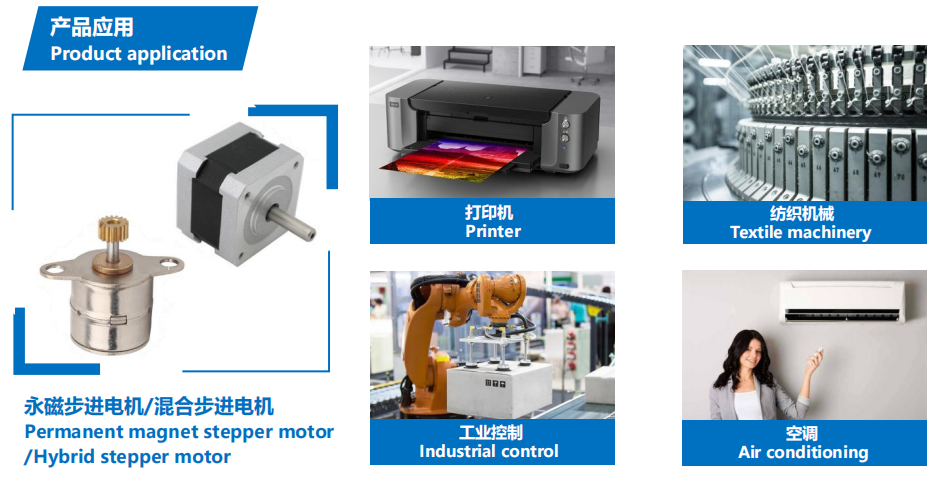
PMステッピングモータの応用
プリンター、
繊維機械、
産業制御、
衛生器具、
サーモスタットバルブ、
温水蛇口、
水温の自動調整
ドアロック
空調
浄水器バルブ等
ステッピングモーターの動作原理
ステッピングモーターの駆動はソフトウェアによって制御されます。モーターを回転させる必要がある場合、駆動は
ステッピングモーターにパルスを印加します。これらのパルスは指定された順序でステッピングモーターに通電し、それによって
モーターのローターを特定の方向(時計回りまたは反時計回り)に回転させます。
モーターの適切な回転を実現します。モーターはドライバからのパルスを受信するたびにステップ角(フルステップ駆動時)で回転し、駆動パルス数とステップ角によってモーターの回転角度が決まります。
リードタイム
サンプルの在庫がある場合は、3日以内に発送できます。
サンプルの在庫がない場合は、サンプルを生産する必要があります。生産時間は約 20 暦日です。
大量生産の場合、リードタイムは注文数量によって異なります。
パッケージ
サンプルは発泡スポンジと紙箱に梱包され、速達で発送されます。
大量生産のため、モーターは外側に透明フィルムを貼った段ボール箱に梱包されます。(航空便による配送)
海上輸送の場合、製品はパレットに梱包されます

支払い方法と支払い条件
サンプルについては、通常、Paypal または Alibaba が受け付けます。
大量生産の場合、T/T 支払いをお受けします。
サンプルについては、生産前に全額お支払いいただきます。
大量生産の場合、生産前に 50% の前払いを受け取り、出荷前に残りの 50% の支払いを徴収することができます。
6回以上のご注文をいただいた後、A/S(アフターサービス)などの他の支払い条件を交渉することも可能です。
支払い方法と支払い条件
1.ギアボックス付きステッピングモーターの理由:
ステッピングモーターは、ステータ相電流の周波数を切り替え、ステッピングモーター駆動回路の入力パルスを変化させることで、低速動作となります。低速ステッピングモーターは、ステッピングコマンドを待機している状態では、ローターは停止状態にあります。低速ステッピングでは、速度変動が非常に大きくなります。このとき、高速動作に切り替えることで速度変動の問題は解決できますが、トルクが不足します。つまり、低速ではトルク変動が発生し、高速ではトルクが不足するため、減速機を使用する必要があります。




