


高トルクNEMA 23ハイブリッドステッピングモーター、モーター直径57mm
説明
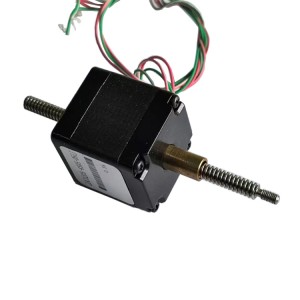
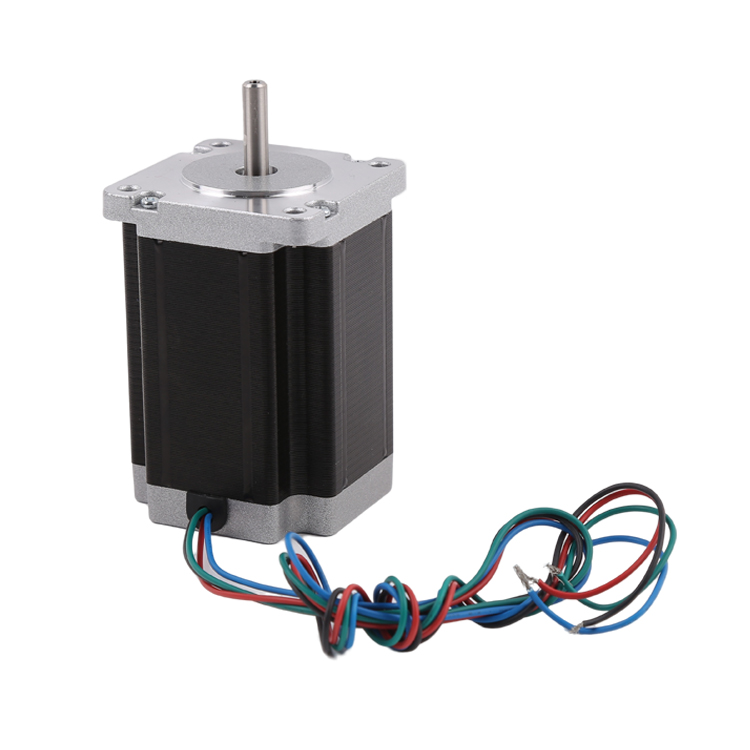
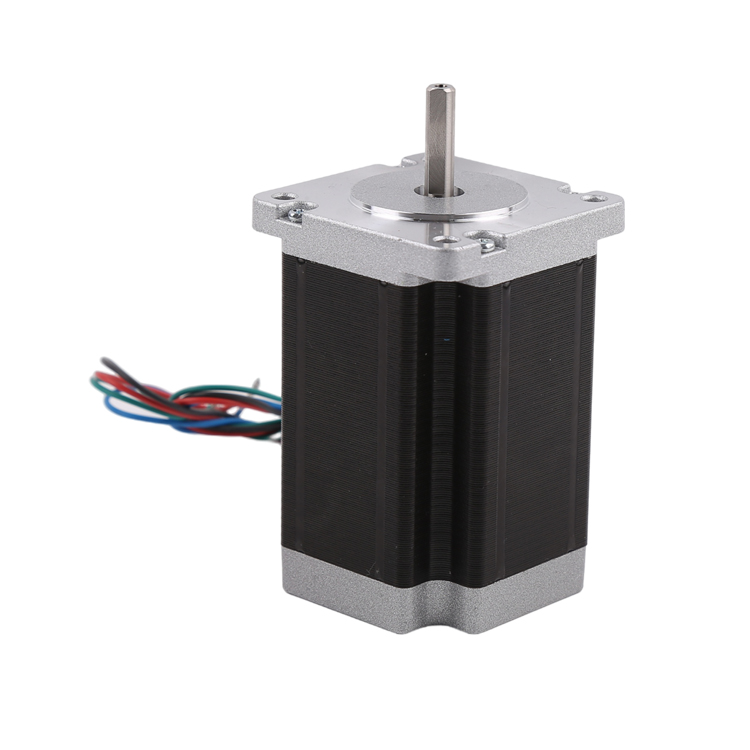
これはNEMA 23規格の直径57mmのハイブリッドステッピングモーターです。
ステップ角度は、お客様が選択できる1.8度と0.9度からお選びいただけます。
モーターの高さは41mm、51mm、56mm、76mm、100mm、112mmです。
モーターの重量とトルクは、その高さに関係している。
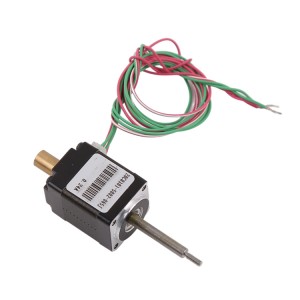
モーターの標準出力軸はD型軸ですが、台形リードスクリュー軸に交換することも可能です。
お客様は、ご自身のニーズに合わせて以下のパラメータをお選びいただけます。モーターに関するご質問がございましたら、お気軽にお問い合わせください。より専門的なサポートをご提供いたします。
パラメータ
| ステップ角度 (°) | モーターの長さ (mm) | 保持トルク (g・cm) | 現在 /段階 (A/位相) |
抵抗 (Ω/段階) | インダクタンス (mH/位相) | 数 リード | 回転慣性 (g*cm2) | 重さ (KG) |
| 0.9 | 41 | 3.9 | 1 | 5.7 | 0.7 | 6 | 120 | 0.45 |
| 1.8 | 41 | 3.9 | 2 | 1.4 | 1.4 | 8 | 150 | 0.47 |
| 0.9 | 51 | 7.2 | 2 | 1.6 | 2.2 | 6 | 280 | 0.59 |
| 1.8 | 51 | 3009 | 2 | 1.8 | 2.7 | 8 | 230 | 0.59 |
| 0.9 | 56 | 12 | 2.8 | 0.9 | 3.3 | 4 | 300 | 0.7 |
| 1.8 | 56 | 9 | 2 | 1.8 | 2.5 | 6 | 280 | 0.68 |
| 0.9 | 76 | 18 | 2.8 | 1.15 | 5.6 | 4 | 480 | 1 |
| 1.8 | 76 | 13.5 | 3 | 1 | 1.6 | 6 | 440 | 1.1 |
| 1.8 | 100 | 30 | 4.2 | 0.75 | 3 | 4 | 700 | 1.3 |
| 1.8 | 112 | 31 | 4.2 | 0.9 | 3.8 | 4 | 800 | 1.4 |
上記の仕様は参考となる標準製品であり、モーターはお客様のご要望に応じてカスタマイズ可能です。
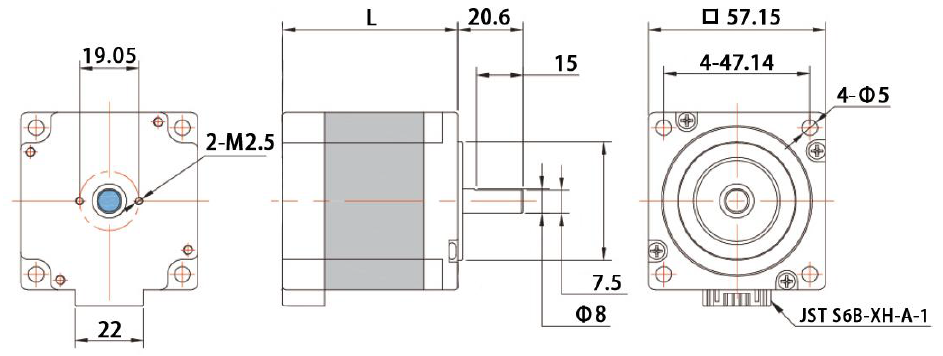
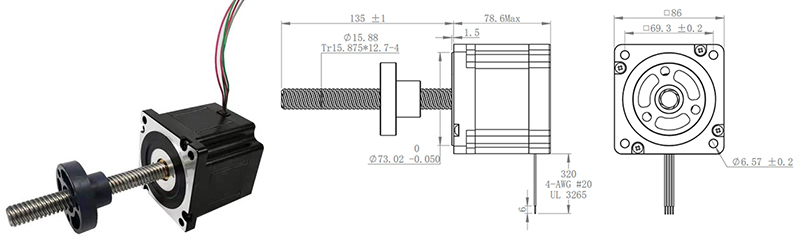
設計図
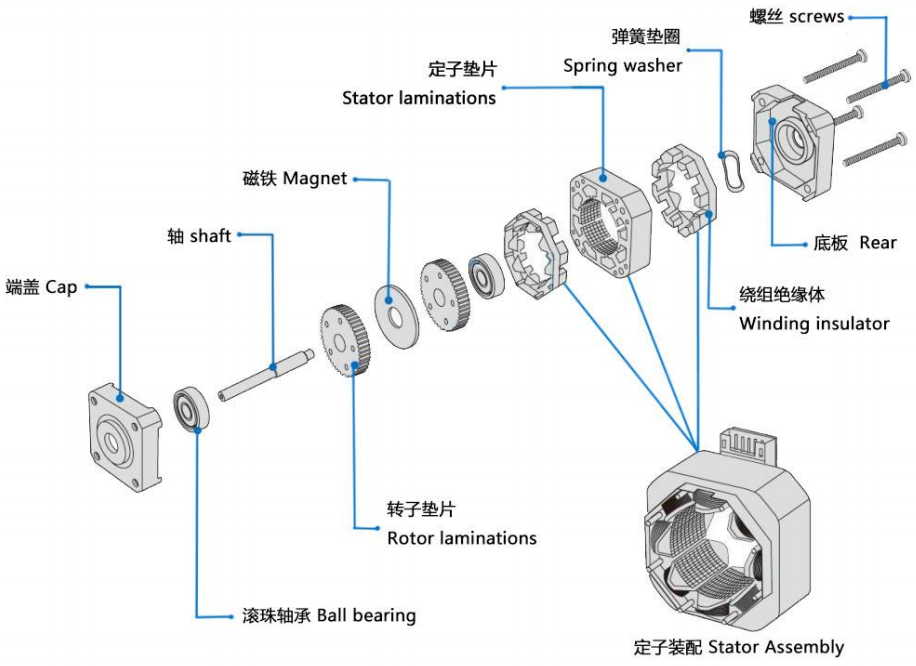
NEMAステッピングモーターの基本構造
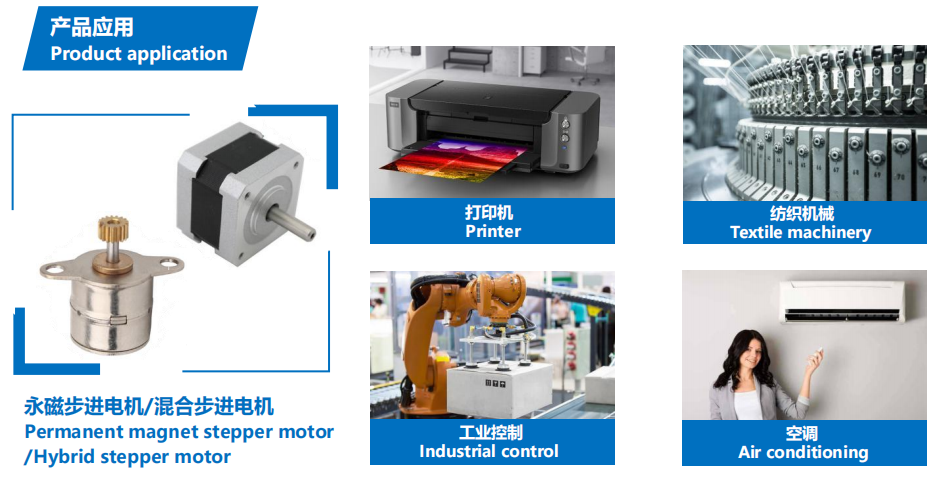
ハイブリッドステッピングモーターの応用
ハイブリッドステッピングモーターは、高分解能(1回転あたり200ステップまたは400ステップ)であるため、以下のような高精度が求められる用途に広く使用されています。
3Dプリンティング
産業用制御(CNC、自動フライス盤、繊維機械)
コンピュータ周辺機器
包装機
そして、高精度な制御を必要とするその他の自動システム。
ハイブリッドステッピングモーターに関するアプリケーションノート
お客様は「まずステッピングモーターを選定し、次に既存のステッピングモーターに基づいてドライバーを選定する」という原則に従うべきです。
ハイブリッドステッピングモーターを駆動する際には、フルステップ駆動モードを使用しないのが最善です。フルステップ駆動では振動が大きくなります。
ハイブリッドステッピングモーターは、低速用途に最適です。回転速度は1000rpm(0.9度で6666PPS)を超えないようにし、できれば1000~3000PPS(0.9度)の範囲で使用してください。ギアボックスを取り付けて速度を落とすことも可能です。このモーターは、適切な周波数において高い動作効率と低騒音を実現します。
歴史的な経緯により、定格電圧12Vのモーターのみが12Vを使用します。設計図に記載されているその他の定格電圧は、必ずしもモーターにとって最適な駆動電圧ではありません。お客様は、ご自身の要件に基づいて適切な駆動電圧とドライバーを選択する必要があります。
モーターを高速または大負荷で使用する場合、通常は動作速度で直接始動しません。周波数と速度を徐々に上げていくことをお勧めします。理由は2つあります。1つ目は、モーターの脱調を防ぐため、2つ目は、騒音を低減し、位置決め精度を向上させるためです。
モーターは振動領域(600 PPS以下)では動作させないでください。低速で使用する必要がある場合は、電圧や電流を変更したり、ダンピングを追加したりすることで振動の問題を軽減できます。
モーターが600PPS(0.9度)未満で動作する場合、小電流、大インダクタンス、低電圧で駆動する必要があります。
慣性モーメントの大きい負荷には、大型のモーターを選定する必要があります。
より高い精度が求められる場合は、ギアボックスを追加したり、モーターの回転速度を上げたり、分割駆動方式を採用したりすることで解決できます。また、5相モーター(単極モーター)を使用することも可能ですが、システム全体の価格が比較的高額になるため、あまり使用されていません。
ステッピングモーターのサイズ:
現在、20mm(NEMA8)、28mm(NEMA11)、35mm(NEMA14)、42mm(NEMA17)、57mm(NEMA23)、86mm(NEMA34)のハイブリッドステッピングモーターを取り扱っております。ハイブリッドステッピングモーターをお選びいただく際は、まずモーターのサイズを決定し、その後他のパラメータをご確認いただくことをお勧めします。
カスタマイズサービス
モーターの設計は、お客様のご要望に応じて調整可能です。
モーターの直径:直径6mm、8mm、10mm、15mm、20mmのモーターをご用意しております。
コイル抵抗/定格電圧:コイル抵抗は調整可能で、抵抗値が高いほどモーターの定格電圧が高くなります。
ブラケットの設計/リードスクリューの長さ:お客様がブラケットを長くしたり短くしたりしたい場合は、取り付け穴などの特別な設計により調整可能です。
PCB + ケーブル + コネクタ:PCBの設計、ケーブルの長さ、コネクタのピッチはすべて調整可能で、お客様のご要望に応じてFPCに交換することも可能です。
リードタイム
在庫にサンプルがある場合は、3日以内に発送できます。
在庫にサンプルがない場合は、製作する必要があり、製作期間は約20日間です。
量産の場合、納期は注文数量によって異なります。
支払い方法と支払い条件
サンプルについては、通常、PayPalまたはAlibabaでのお支払いを受け付けております。
量産の場合、T/T送金によるお支払いを受け付けております。
サンプルについては、製造前に全額をお支払いいただきます。
量産の場合、生産開始前に50%の前払い金をお支払いいただき、残りの50%は出荷前にお支払いいただくことが可能です。
6回以上協力してご注文いただいた後は、A/S(一覧払い)などの他の支払い条件について交渉することも可能です。
よくある質問
1. サンプルの一般的な納期はどのくらいですか? バックエンドの大口注文の納期はどのくらいですか?
サンプル注文の納期は約15日、大量注文の納期は25~30日です。
2. カスタムサービスは受け付けていますか?
当社では、モーターの仕様、リード線の種類、出力軸など、製品のカスタマイズを承っております。
3. このモーターにエンコーダーを追加することは可能ですか?
このタイプのモーターの場合、モーターの摩耗キャップにエンコーダーを追加することができます。
よくある質問
1. ステッピングモーターの長期使用後の負荷増加の原因と対策
原因:ステッピングモーターは、場合によっては長時間正常に動作しても、一定期間後にステップを失うことがあります。この場合、ステッピングモーターにかかる負荷が変化したと考えられます。これは、ステッピングモーターのベアリングの摩耗や外部からの影響が原因である可能性があります。
解決。
①外部環境に変化がないことを確認してください:モーター駆動機構に変更はありませんか?
②ベアリングの摩耗を確認する:モーターの寿命を延ばすために、ブッシングの代わりにボールベアリングを使用してください。
③周囲温度が変化していないことを確認してください。マイクロモーターの場合、ベアリンググリースの粘度の影響は無視できません。動作範囲に適したグリースを使用してください。(例えば、グリースは極端な温度や長時間の使用によって粘度が増し、モーターへの負荷が増加する場合があります。)
2.ステッピングモーターの発熱の原因
①ドライバによって設定された電流は、モータの定格電流よりも大きい。
②モーターの速度が速すぎる
③モーター自体の慣性と位置決めトルクが大きいため、中速運転でも高温になりますが、モーターの寿命には影響しません。モーターの減磁点は130~200℃なので、70~90℃は正常な現象です。130℃未満であれば通常は問題ありません。過熱していると感じる場合は、駆動電流を定格モーター電流の約70%に設定するか、モーター速度を少し下げてください。
3.ステッピングモーターの電源を入れたのに、モーターシャフトが回転しない場合はどうすればよいですか?
モーターが回転しない理由はいくつか考えられます。
A.過負荷による回転阻害
B.モーターが損傷しているかどうか
C.モーターがオフラインかどうか
D.パルス信号CPがゼロになるかどうか